| 您的当前位置: |
|

该团队在这项研究中使用了达芬奇手术系统。这是一个机器人系统,通常由外科医生远程控制,外科医生的手臂可以操纵器械进行解剖、抽吸以及切割和密封血管等任务。像这样的系统为外科医生提供了更大的控制力、精度,并可以更仔细地观察手术台上的患者。最新版本的成本估计超过 200 万美元,这还不包括配件、消毒设备或培训。
该团队使用一种称为模仿学习的机器学习方法,训练了达芬奇手术系统自行执行外科手术中涉及的三项任务:操作针头、提升身体组织和缝合。
约翰霍普金斯大学助理教授阿克塞尔·克里格 (Axel Krieger) 说:“手术系统不仅像人类一样执行这些任务,而且还学会了纠正自己的错误。“就像如果它掉了针,它会自动捡起来并继续。这不是我教它做的事情”。
研究人员通过将模仿学习与 ChatGPT 等流行聊天机器人构建的机器学习架构相结合来训练 AI 模型。然而,虽然这些聊天机器人旨在处理文本,但该模型会使用一种用于用数字和方程等数学元素描述运动的语言来指导手术系统的手臂。
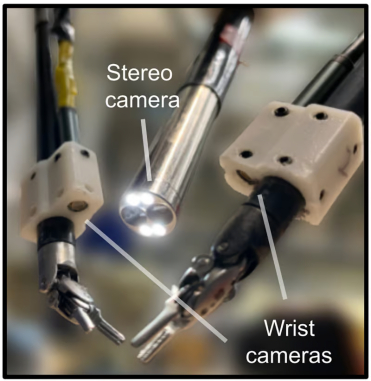
该模型是在外科手术过程中使用放置在达芬奇机器人手臂上的手腕摄像头录制的数百个视频进行训练的。

该团队相信,其模型可以训练机器人快速执行任何类型的外科手术,而且比手动编码指导手术机器人动作所需的每个步骤的传统方法要容易得多。
根据 Krieger 的说法,这可能有助于比我们以前想象的更快地使自动化手术成为现实。“这里的新情况是,我们只需要收集不同程序的模仿学习,我们可以训练机器人在几天内学会它,”他说:“它使我们能够加速实现自主目标,同时减少医疗错误并实现更准确的手术。”

这可能是近年来机器人辅助手术领域最大的突破之一。市面上有一些用于复杂手术的自动化设备,例如用于心血管手术的 Corindus CorPath 系统。但是,他们的能力通常仅限于他们帮助的手术的某些步骤。
此外,Krieger 指出,为机器人系统编写每个步骤的编码可能会非常缓慢。“有人可能会花十年时间试图模拟缝合,”他说。“而且这只是一种手术的缝合。”
Krieger 之前还研究过一种不同的方法来自动化手术任务。2022 年,他的研究团队在 JHU 开发了智能组织自主机器人 (STAR)。在基于结构光的三维内窥镜和基于机器学习的跟踪算法的引导下,机器人在没有人工干预的情况下,将猪肠道的两端错综复杂地缝合在一起。
主办单位:伟德源自英国始于1946 地址:南京市江北新区星火路19号星智汇商务花园A1幢 邮编:210000
版权说明:Copyright © 伟德国际(bevictor·CHN认证)官方网站_始于英国源自1946 All Rights Reserved.

伟德源自英国始于1946集团
主办单位:伟德源自英国始于1946
通信地址:南京市江北新区星火路19号星智汇商务花园A1幢 邮编:210000
版权说明:Copyright © 伟德国际(bevictor·CHN认证)官方网站_始于英国源自1946 All Rights Reserved.
伟德源自英国始于1946






