| 您的当前位置: |
|

实验表明,小五可在真实人居环境中完成行走、搬运物体等动作,例如给老人取快递、抱老人起床等。

养老院室内外场景定位建图结果
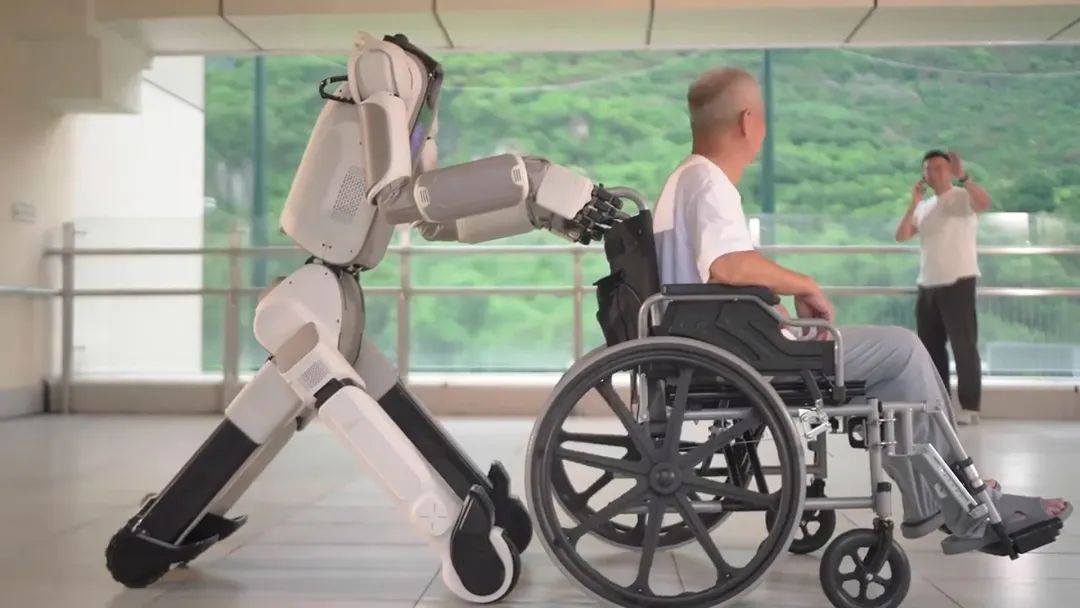
多层级(路径级-轨迹级)的在线运动规划,小五可以利用激光雷达和 RGBD 相机等传感器数据,实时检测周围环境中的动静态障碍物,并在线规划最优路径和控制指令,避免碰撞和意外发生,确保在复杂环境中安全高效地完成任务,比如携人推轮椅主动避障。

推轮椅过程中携人避障

上楼梯

在抱扶老人的过程中,高分辨率的触觉系统能够帮助“小五”以更安全和精确的方式提供支持和辅助,有效避免对老人造成不必要的压力或伤害。
这些技术的整合不仅提高了“小五”的功能性,也增强了其在实际操作中的敏感性和人性化表现。
人-人抱扶过程数据采集
小五的直线腿设计有效提升了承载能力,可根据作业空间需求调整支撑高度。在抱扶老人的过程中,高分辨率的触觉系统能够帮助小五以更安全和精确的方式提供支持和辅助,有效避免对老人造成不必要的压力或伤害。
据腾讯Robotics X实验室官方介绍,“小五”与此前的机器人最大的不同,是在本体上采用了四条直线腿和轮足复合的设计,既保持了足式机器人的越障能力,也保持了轮式机器人运行的效率,让机器人在平地上有更快的速度,这个从上面的视频中“小五”攀爬楼梯就能看出来,交叉足上楼梯并且当蹬上平地后自动变为轮式前行。

负载能力上,“小五”通过直线腿设计有效提升承载能力,每条直线腿可以单独伸长缩短,可以根据不同的作业空间需求,调整支撑高度,从而实现“上摸高、下摸地”的广阔作业空间,例如帮助用户取放高处的物品,或者在低矮的空间中操作。

“小五”还可以自主折叠与展开,当不需要工作时,“小五”可以自主折叠起来,减少占用空间,方便运输。看看人家“小五”自动折叠的优雅动作。
除了形态创新之外,根据腰部大负载的需求,“小五”采用自研的双编码器大扭矩密度的执行器,让机器人能够更有力量,同时也在手臂上部署了自研的具有180个检测点的大曲面覆盖触觉皮肤,这使得“小五”能够拥有更加敏锐的“感官”,可以根据外界环境的变化作出相应的反应。
同时,依托触觉和视觉感知,以及识别、规划和控制算法,“小五”能够与人类进行安全舒适的物理交互,并准确地理解、预测并满足人类的日常行动需求。

为了使该模型更符合老人个性化的运动特性,实验室团队成员通过采集了少量老人的抱扶数据,让模型从中学习出符合被抱扶老人的最优模型参数,从而使该模型更符合老人被抱扶站立的运动特性。
让机器人掌握人类在物理世界的真实动作并非易事,哪怕就是这么一个简单的常用动作,其背后所需要采集、模拟、分析并反复试错的工作就相当繁琐与复杂。
伴随着相关技术的不断进步,市场需求、资本投入与政策的大力支持,都将推动智能机器人产业的快速发展。
或许5年后,你我身边都会多出这么一个人类生活的好伙伴与智能助手。
主办单位:伟德源自英国始于1946 地址:南京市江北新区星火路19号星智汇商务花园A1幢 邮编:210000
版权说明:Copyright © 伟德国际(bevictor·CHN认证)官方网站_始于英国源自1946 All Rights Reserved.

伟德源自英国始于1946集团
主办单位:伟德源自英国始于1946
通信地址:南京市江北新区星火路19号星智汇商务花园A1幢 邮编:210000
版权说明:Copyright © 伟德国际(bevictor·CHN认证)官方网站_始于英国源自1946 All Rights Reserved.
伟德源自英国始于1946






